自動駕駛汽車需要持續的態勢感知:他們需要先進的傳感器(雷達、激光雷達、高分辨率相機等)來不斷捕獲汽車執行自動任務所需的環境信息。這需要一套高性能嵌入式計算(HPEC)系統,該系統能夠處理大量數據,與傳感器交換這些數據并應用邊緣AI(人工智能)和深度學習算法來實時訓練車輛。
Eurotech提供的HPEC系統可以組合在一起,以在汽車和堅固型應用中提供無與倫比的性能和容量。這些系統提供存儲、計算、網絡和邊緣AI以及深度學習功能,以應對5級自動駕駛的挑戰(車輛是完全自動的,無需駕駛員干預)
Eurotech HPEC系統通過了汽車應用認證,并具有液體冷卻功能,可與用戶應用無縫集成。
以下是采用Eurotech HPEC系統以實現自動駕駛的3種可能的架構。
高性能數據記錄
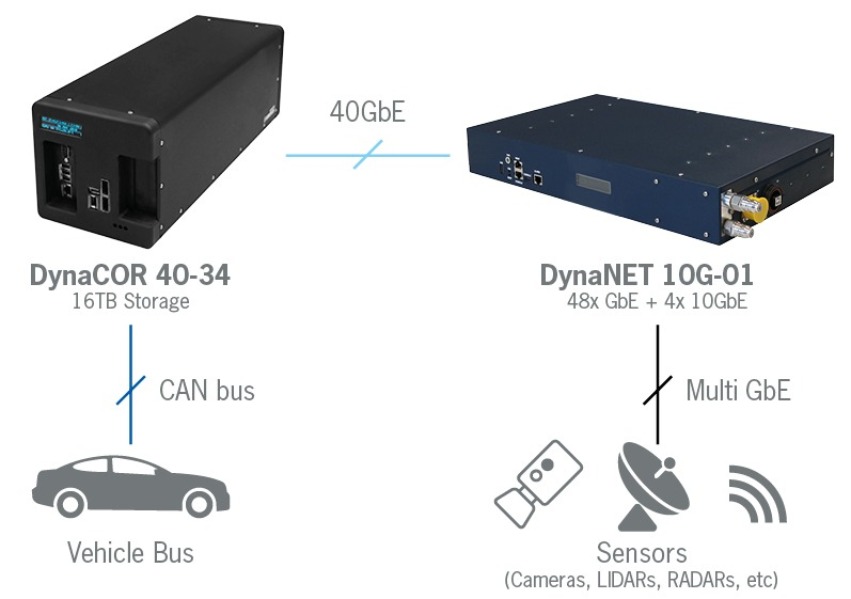
該用例是簡化的高性能數據記錄應用的示例,其中DynaCOR 40-34通過DynaNET 10G-01接收來自多個車輛傳感器的聚合數據流。該架構具有40GbE骨干網和多達48個1GbE數據源的良好平衡。
該設置為需要在實際駕駛條件下收集車輛和環境數據集的客戶提供了巨大價值,他們利用現有的商用車輛進行了最少的修改。該系統的極致緊湊性及其汽車認證允許僅使用典型小型汽車后備箱體積的一小部分安裝DynaCOR 40-34和DynaNET 10G-01。
自動駕駛:在邊緣AI上搭載高性能計算
該用例將可擴展的計算功能添加到上一節中說明的獨立體系結構的日志記錄功能中,并引入了兩個新的構建塊,這些構建塊啟用了車載邊緣AI。DynaCOR 50-35是一款堅固的HPEC服務器,具有無與倫比的計算能力,可在邊緣支持AI和深度學習算法以實現自動駕駛。該DynaNET 100G-01是一款高性能的以太網交換機,100G以太網端口,用于大量雙向數據傳輸。
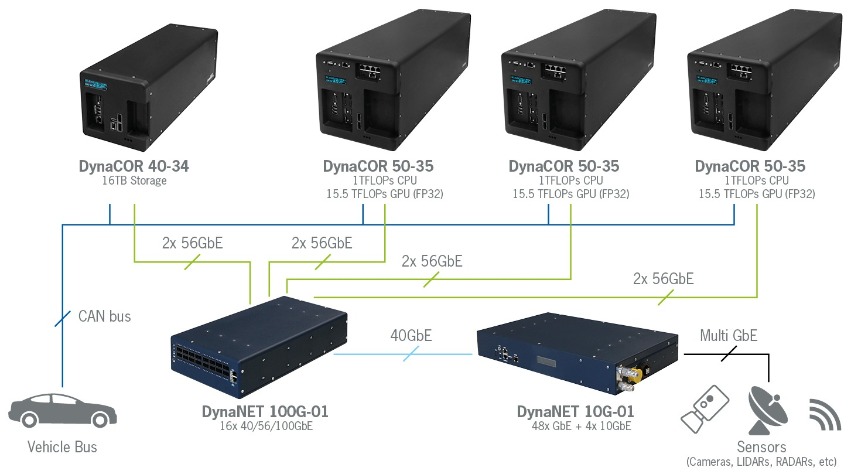
在此處顯示的示例中,傳感器數據流由DynaNET 10G-01聚合,然后饋入主干DynaNET 100G-01。在這種安排下,所有DynaCOR都利用2x56GbE鏈路,每個設備的總帶寬為112Gb/s,可以動態分配。假設連續的實時傳感器數據流(最高40Gb/s)將被定向到第一個DynaCOR接口,而將第二個可用于計算任務和消息,則是相當合理的。
DynaNET 100G-01和DynaNET 10G-01的顯著特征是第3層網絡,可實現非常精細的流量管理。這對于最大程度地減少延遲并確保將數據流定向到正確的設備,避免數據匱乏和類似的其他網絡問題(對于整個體系結構而言,確定性的運行條件會造成惡化)至關重要。
由于DynaNET 100G-01提供了16個端口,每個端口能夠支持40/56 / 100Gb / s,并且DynaCOR 40-34和DynaCOR 50-35都具有雙重40 / 56Gb / s接口,因此可以混合和匹配多達使用40 / 56Gb / s鏈接的15個DynaCOR,或使用80 / 112Gb / s鏈接的多達7個DynaCOR。一個或兩個40GbE鏈路可用于連接到一個或兩個DynaNET 10G-01的傳感器網絡。
通過混合和匹配構建基塊,可以達到極限配置,例如:高達256TB的NVMe存儲容量(使用16個存儲設備),或高達16TFLOP(CPU)+ 248TFLOP(GPU,FP32)的計算性能,以及兩者之間的任何東西。這使邊緣AI和深度學習能夠在板上進行大量數據處理。
值得注意的是,每個DynaCOR均具有2個GbE接口,即使在這些極端情況下,也可以直接連接傳感器。此外,DynaCOR 50-35可以配置NVME存儲,為客戶提供額外的靈活性。
用于自動駕駛的冗余HPEC架構
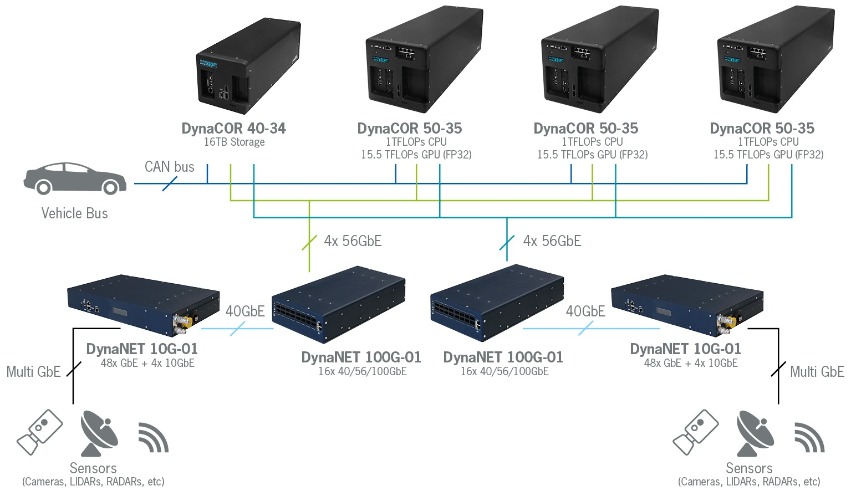
在最后一個示例中,我們展示了如何通過添加兩個以上的交換機來實現冗余體系結構。盡管這是一種簡單化的方法,不能完全反映實際情況下如何實現真正的冗余體系結構,但它仍然說明了如何在普通車輛中創建非常復雜的計算和存儲基礎結構,同時又保持良好的物理約束力。由空間、操作條件和總允許功率決定。
|



