─úëK╠ϳc
| PLCcore Firmware: |
IEC61131-3 |
| PLCcore-iMX35: |
IEC61131-3 runtime kernel pre-installed, Shared process image, CiA302/314 compliant CANopen manager, Customizable I/O driver, Program download via Ethernet |
| PLCcore-iMX35 HMI: |
IEC61131-3 runtime kernel pre-installed with SpiderControl MicroBrowser GUI, Shared process image, CiA302/314 compliant CANopen manager, Customizable I/O driver, Program download via Ethernet |
| Controller: |
Freescale i.MX357 with ARM11 Core |
| System Clock: |
532 MHz |
| RAM: |
128MiB DDR2-SDRAM |
| FLASH: |
128MiB NOR |
| On-board Peripherals: |
DMA, MMU, hardware watchdog, temperature sensor, RTC |
| Fast Ethernet: |
1x 10/100Mbps, on-board PHY |
| CAN: |
2 |
| UART: |
3 |
| USB: |
1x USB 2.0, 12Mbps full-speed
1x OTG |
| SPI/I2C: |
1/1 |
| Mass storage: |
MMC/SD-card signals on board-to-board connector |
| LCD: |
TFT-LCD interface brought out via CMOS , resolution 800x600 max. 24bit |
| Others: |
S/PDIF |
| Operating Conditions: |
Temperature: -40°C…+85°C
Humidity: 10-90% RH, non-condensing |
| Power Supply: |
3.3V +/- 5%, 0.3A max. |
| Dimensions/Weight: |
78 x 54 x 7,2 (L x W x H in mm), 20g |
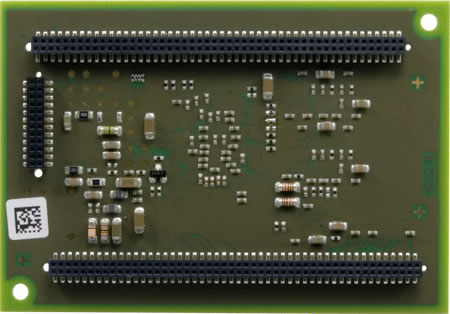
| Board-to-board connector: |
2x 2x 50 pin header socket, 1.27 mm pitch |
| Available on board-to-board connector: |
2x CAN, 3x ASC, 2x USB, I²C, SPI, 2x SD-card, 18x GPIO, Ethernet, TFT-CMOS, PWM/DIO, Timer/Counter/DIO |
| RoHS compliant: |
yes |
| Operating System: |
Linux, QT framework optionally |
| Integrated Development Environment (IDE): |
IEC 61131-3 IDE (OpenPCS) with SYS TEC vendor extensions for PLC programming,
Pre-integrated Eclipse-based IDE with GNU C/C++ tool chain, source- and assembly-level debugger |
|
|
ıf├¸
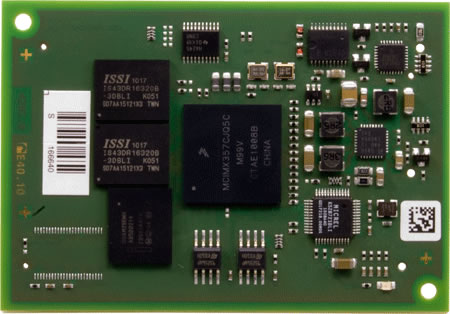
The PLCcore-iMX35 is an IEC 61131-3-programmable Soft-PLC with integrated target visualization. That's why it represents itself as the ideal base component for designing user specific HMI devices. The PLCcore-iMX35 provides 16 digital inputs and 10 digital outputs for direct connection to local peripherals. Due to the various communication interfaces such as Ethernet, CAN and serial interfaces, furthermore remote extension equipment can be connected. The PLC Runtime System supports data exchange by several function block libraries for CANopen, CAN Layer 2, UDP and SIO.
The PLCcore-iMX35 allows for direct connection of CMOS and LVDS displays. The integrated target visualization is based on the SpiderControl MicroBrowser and supports touchscreen, scroll wheel as well as matrix und USB keyboards as input devices. The adjustment of the keyboard layout can be made by using function blocks of the PLC.
Only a minimal peripheral wiring is necessary to apply the PLCcore-iMX35 on an application-specific baseboard. That's why devices based on this core module can be designed very cost-efficiently. The Linux BSP, which is provided in source code, allows for application of user-specific peripheral components. Furthermore, the configuration of start scripts and kernel-internal drivers can be reduced in a manner, that boot-up time spans less than 3 seconds from power-on until displaying the process visualization can be reached.
Additional arbitrary Linux applications can be executed on the PLCcore-iMX35 in parallel to the PLC Runtime System. For data exchange between a Linux application and the PLC Runtime System, inter process communication mechanisms such as FIFOs or mutex-protected Shared Memory are available. Furthermore, the PLC has full access to the file system. On demand, data can be written to or read from any mounted media.
The PLCcore-iMX35 is equipped with an on-board Flash of 128 MiB, whereby a memory range of 90 MiB is freely available as mass storage for the PLC program, for visualization data and for process data. Due to the usage of UBIFS (Unsorted Block Image File System) with active journaling, the file system keeps in a consistent state even in case of an unexpected power supply break down.
The PLC Runtime System allows for usage of both CAN interfaces as CANopen-Manager. The integrated CAN controllers are equipped with a receive FIFO. That's why even applications with permanent CAN bus load up to 70 percent can be implemented without any packet loss of CAN messages.
The optional web visualization supports monitoring, servicing and diagnostic system analysis from remote PCs, even from far. |