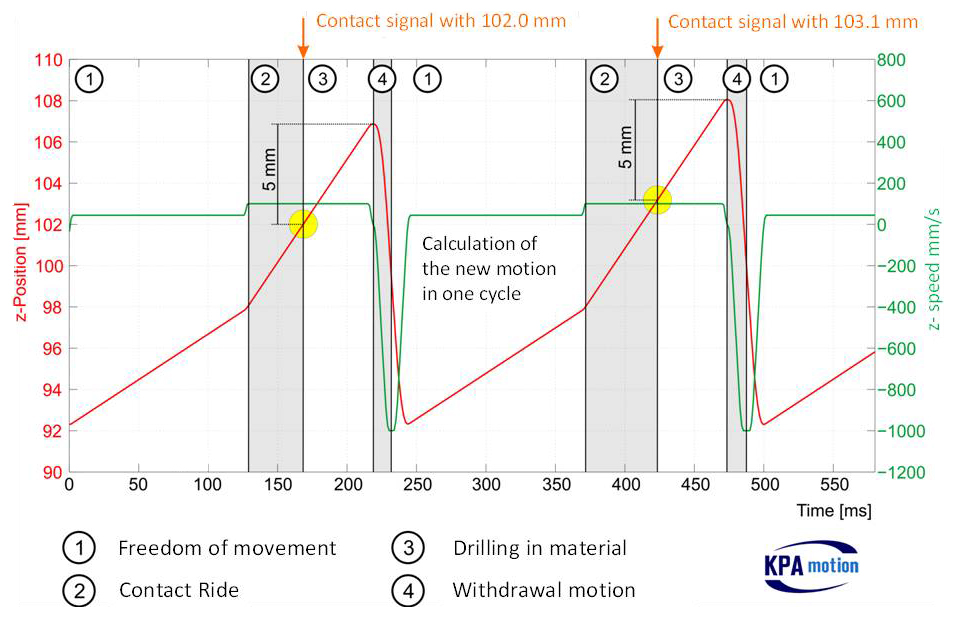
Phase 1 starts with a slow motion to allow for positioning the x-y table. Phase 2 contains a fast approach motion, during which the contact with the material is expected. At the moment of contact, the exact position is captured using a touch probe sensor ( 102.0 mm, left yellow circle), and in the same control cycle, a drilling motion relative to this position is computed online and executed immediately (Phase 3). After reaching the depth of 5 mm, the drill is pulled out of the material (Stage 4). In the second cycle, the contact is detected at 103.1 mm (right, yellow circle). |
|
The picture below shows a comparison between conventional calculation methods and the online trajectory generation concept implemented in KPA Motion.
Measuring the precise contact position and instantaneously computing a new motion trajectory improves drilling, turning, and milling precisions – without slowing down manufacturing processes. |

.jpg)
